Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Developing a deep-learning based computational pipeline to integrate multiscale preclinical imaging consisting of in-vivo PET imaging, autoradiography and histopathology for analyzing biological interpretability and to improve therapeutic predictions. The framework consists of three different aspects (1) To develop automatic registration for multiscale imaging i.e., autoradiography (ex-vivo PET) with corresponding H&E and IHC data. (2) Developing a deep-learning based correlative analysis pipeline (CorrNet) for studying the correlation of autoradiography features (ex-vivo PET) to that histopathological features (H&E/IHC). (3) Correlate and integrate in-vivo data (PET) and histopathological data (H&E/IHC) in feature space by combining cytometric and radiomics features to predict therapeutic response 
Developed a deep-learning powered pipeline for generating quantitative Standard-Count preclinical PET (SC-PET) images from different realizations of Low-Count preclinical PET (LC-PET). For generating SC-PET images we developed a novel deep-learning architecture called Attention based Residual Dilated Network (ARD-Net) consisting of Enhancement Attention Modules (EAM) for efficient feature learning and feature consolidation. The performance of the architecture was evaluated utilizing a multi-objective evaluation framework which consists of fidelity based metrics, task based segmentation performance analysis followed by a task-based quantification analysis to test the robustness of our designed DL framework to extreme low-count PET quantitative and segmentation recovery.
The above pipeline was also replicated to design a self-supervised learning framework utilizing the Noise2Noise principle where SC-PET images were generated from Low-Count PET images only without corresponding ground truth (actual SC-PET). To realize the N2N principle we implemented the N2N Multi-Block Residual Networ (N2N-MBRNet) which consists of multiple residual units. [CODE] 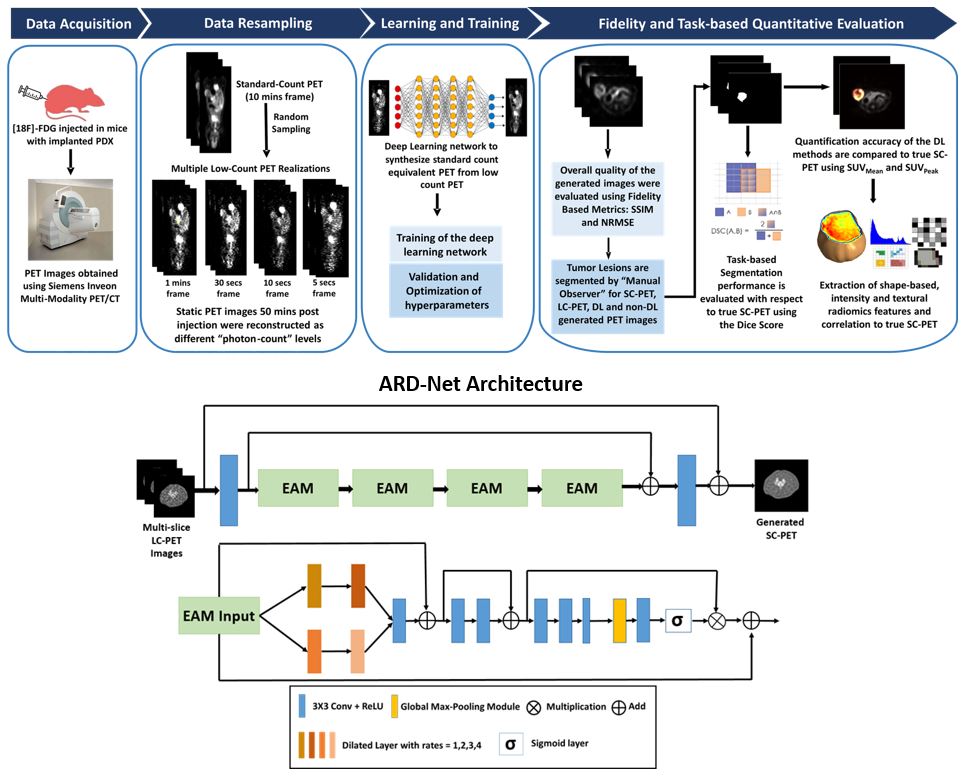
Developed a end-to-end pipeline for automatic tumor segmentation and quantitative analysis for preclinical multiparametric Triple Negative Breast Cancer (TNBC) PDX MR images. The pipeline consists of a novel deep-learning architecture called Dense Recurrent Residual U-Net (DR2U-Net) for automatic tumor segmentation. Further we extracted radiomics features from the segmented maps to validate the robustness of segmentation boundaries and estabilished the reporducibility of the framework. Currently our algorithm is deployed in the PIXI platform to be tested on multi-institutional datasets to estabilish generalizibility of the model and provide high-throughput reproducible radiomic analysis. [CODE] [PAPER] 
Published in Robotics and Automation Letters (RA-L), 2022
The ability to autonomously navigate safely, especially within dynamic environments, is paramount for mobile robotics. In recent years, DRL approaches have shown superior performance in dynamic obstacle avoidance. However, these learning-based approaches are often developed in specially designed simulation environments and are hard to test against conventional planning approaches. Furthermore, the integration and deployment of these approaches into real robotic platforms are not yet completely solved. In this paper, we present Arena-bench, a benchmark suite to train, test, and evaluate navigation planners on different robotic platforms within 3D environments. It provides tools to design and generate highly dynamic evaluation worlds, scenarios, and tasks for autonomous navigation and is fully integrated into the robot operating system. To demonstrate the functionalities of our suite, we trained a DRL agent on our platform and compared it against a variety of existing different model-based and learning-based navigation approaches on a variety of relevant metrics. Finally, we deployed the approaches towards real robots and demonstrated the reproducibility of the results.
Recommended citation: L. Kastner et. al. (2022) "Arena-Bench: A Benchmarking Suite for Obstacle Avoidance Approaches in Highly Dynamic Environments" Robotics and Automation Letters. https://arxiv.org/abs/2206.05728
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.